From Japan Focus
Abstract: Over the past decade, the concept of the “uncanny valley” (bukimi no tani) coined by roboticist Mori Masahiro (b. 1927), has appeared in over ten thousand (English-language) articles and chapters, Briefly, the concept presumes that the scary surprise of realizing that, say, a flesh-and-blood human was actually a zombie will send one tumbling into a valley of existential queasiness. As an application, this effect was hypothesized by Mori as grounds for avoiding the design and manufacture of humanlike robots or androids. In this edited and augmented excerpt from chapter 6 (Cyborg-Ableism beyond the Uncanny [Valley]) of my book, Robo Sapiens Japanicus: Robots, Gender, Family, and the Japanese Nation (2018), I interrogate the ‘uncanny valley” hypothesis, which has been accorded an almost “natural-law”-like status. I critically examine Mori’s original 1970 essay in Japanese and draw attention to some of the problems posed both by translating bukimi as “uncanny” and by treating the “uncanny valley” as a self-evident truism.
Keywords: uncanny valley, robots, androids, prosthetics, Japan, Mori, Freud, Jentsch
Introduction
Over the past decade, the concept of the “uncanny valley” (bukimi no tani) coined by roboticist Mori Masahiro (b. 1927), has appeared in over ten thousand (English-language) articles and chapters, Briefly, the concept presumes that the scary surprise of realizing that, say, a flesh-and-blood human was actually a zombie will send one tumbling into a valley of existential queasiness. As an application, this effect was hypothesized by Mori as grounds for avoiding the design and manufacture of humanlike robots or androids. In this augmented and edited excerpt from chapter 6 (Cyborg-Ableism beyond the Uncanny (Valley) of my book, Robo Sapiens Japanicus: Robots, Gender, Family, and the Japanese Nation (2018), I interrogate the ‘uncanny valley” hypothesis, which has been accorded an almost “natural-law”-like status. I critically examine Mori’s original 1970 essay in Japanese and draw attention to some of the problems posed both by translating bukimi as “uncanny” and by treating the “uncanny valley” as a self-evident truism.
What is a Robot?
Before proceeding, a brief working definition of “robot” is in order, beginning with the origin of the word itself. The English word derives from the Czech word robota, or drudge laborer or serf. Coined by litterateur Karel Čapek (1890–1938) and his artist brother Josef Čapek (1887–1945), the word first appeared in the former’s play, R.U.R. (Rossumovi Univerzální Roboti [Rossum’s Universal Robots], published in 1920. The play debuted in Prague in 1921. A science-fiction melodrama with comical passages, R.U.R. is about a factory in the near future where artificial humans gendered “female” and “male” are mass-produced from protoplasmic batter as tireless workers for export all over the world.1 To make a long story short, new model robots are provided with emotions and, now able to experience anger at their exploitation, they revolt en masse, killing all but one human. R.U.R was performed in Tokyo in 1924 and sparked a fascination in Japan with robots—robotto. Even though the robots in R.U.R. are bent on destroying humans, and even though there are evil robots in Japanese science fiction, the dominant perception of robots in Japan since the 1920s has been very positive. Today, actual tangible, real-world robots are symbols of Japanese advanced technology, platforms for spin-off industries, and brand ambassadors of transnational companies like Honda’s ASIMO, Mitsubishi’s Wakamaru, Hitachi’s EMIEW, and SoftBank’s Pepper.
Real-world robots are far more complex and versatile than automatons, but much less dexterous and proficient than their science fiction counterparts. There are several categories of robots: industrial robots (that look like mechanical arms), humanoids (made of plastic and metal that resemble the human body to some extent), and androids (that look like real humans and have body parts made of skin-like silicon). Most humanoids and all androids are gendered (Robertson 2010 and 2018: 80-120). Perusing the large literature on robotics, I composed a definition of “robot” that is comprehensive yet concise: A robot is an aggregate of different technologies—sensors, optics, haptics, software, telecommunication tools, actuators, motors, and batteries—that make it capable of interacting with its environment with some human programming and supervision, including tele-operation. Unlike automatons, robots can respond to information about their surrounding environment gathered by their sensory devices and change the sequence of actions. There is a lot of hype about autonomy these days, but there are no truly autonomous robots in service; they are programmed to perform via software algorithms and floor sensors or activated via remote control.
Metaphoric Valleys
Mori Masahiro studied electrical engineering at Nagoya University before joining the Institute of Industrial Science at Tokyo University where he defended his doctoral thesis in 1959 on “sample value control” (sanpuru chiseigyo). He collaborated on research focused on automated vs. manual labor, artificial fingers and organs, time management, and informatics, before publishing in 1970, Bukimi no Tani, the essay that would eventually make him an international celebrity engineer.
Mori published his essay on bukimi no tani, (mis)translated as “uncanny valley,” in 1970 in Enajii (Energy), a Japanese-language journal (figure 1) published by then Esso (now Exxon) Japan2 shortly after Expo ’70 had opened in Osaka from March 15 to September 13. With the theme of “progress and harmony for humankind,” the world’s fair included a cybernetic zoo and dozens of robot displays.

As the online catalogue of images from Expo’70 demonstrates, the robots on display looked like giant, retro tin-robot toys (Expo ’70 Fujipan Pavillion Robots 2011). Mori mentions that one of the robots showcased at Expo ’70 was fitted with twenty-nine artificial muscles in its face to make it smile in a humanlike fashion. He notes that the inventor explained that a smile is a sequence of deformations and that the speed of that sequence is critical. If the robot’s mouth moves too slowly, then the effect is less a “smile” (nikkori) and more of a “creepy grin” (nyāttoshita). Thus, he hypothesizes that if robots, dolls, and prosthetic hands are made to closely resemble humans, it would be a “misstep” that, like an overly slow smile, could cause one to quickly fall into the bukimi no tani (Mori 1970 [2012a]: 7).
Mori opens his essay with the subhead, “affinity valley” (shinwakan no tani), or more literally, “familiar feeling valley.” His first sentence expounds on “monotonically increasing function,” a mathematical term that Mori explains with the equation “function y = f(x).” Basically, the monotonicity of a function tells us if the function is increasing or decreasing, in this case the former: “as a car’s accelerator (x) is pressed, the car moves faster (y).” Mori complicates this simple cause-effect explanation by employing a mountaineering metaphor: “x” represents the distance a mountain climber has traveled and “y” the altitude the climber has reached. The upward trek is compromised by the undulating landscape. If the climber is not careful then she or he could trip and fall into a valley.
Although Mori does not describe the formula this way, a monotonic increase can also be understood as a teleological progression: the way forward and upward is taken for granted, even if occasionally interrupted by uneven terrain. Taken for granted, that is, until something truly unexpected disrupts the climber’s steady ascent. If that something’s appearance and/or movement at the time of the encounter are startling, then the climber draws back, and may even fall into an unknown and unfamiliar crevice—namely, the bukimi no tani. I should note here that bukimi is more accurately translated as a “bad” (bu) “feeling” (kimi) in the sense of spooky, eerie, ominous, disconcerting, or frightening (Bukimi 1978: 1925). “Valley of eerie feeling” is closer to Mori’s meaning. To rephrase in terms of robot design, Mori suggests that the more realistically humanlike the robot, the more creepy and disconcerting it will become, plunging with its human interactor into the metaphoric valley.
Prosthetics
Mori then proceeds to compare and contrast industrial robots (which look like jointed mechanical arms with a variety of “end effectors”) and toy robots. In 1970, when Mori penned his essay, industrial robots bore little resemblance to the human form as their design was dictated by their function. Many toy robots, however, were anthropomorphic, and, based on his own observations, Mori claims that children seemed to feel deeply attached to them. There was no corroborating ethnographic research at the time on how humans perceive and interact with actual robots other than toys or in science fiction and manga. As an aside, even today despite the media hype, there is very little interaction between humanoid robots or androids and humans; with the exception of factory-based industrial robots, the closest most Japanese get to encounter an actual humanoid robot or an android is in a science museum, a corporate showroom, a shopping mall, a department store, a hospital, or a nursing home, and only with a great deal of supervision. Most of these real humanoids and androids are prototypes, and many are temporarily loaned to these institutions for public relations or experimental purposes. The most successful “therapy” robot is not a humanoid but an animaloid, PARO, modeled after a harp seal (PARO 2014); the most successful household robots are appliances, notably iRobot’s Roomba which can be programmed to vacuum a room and has many competitors.
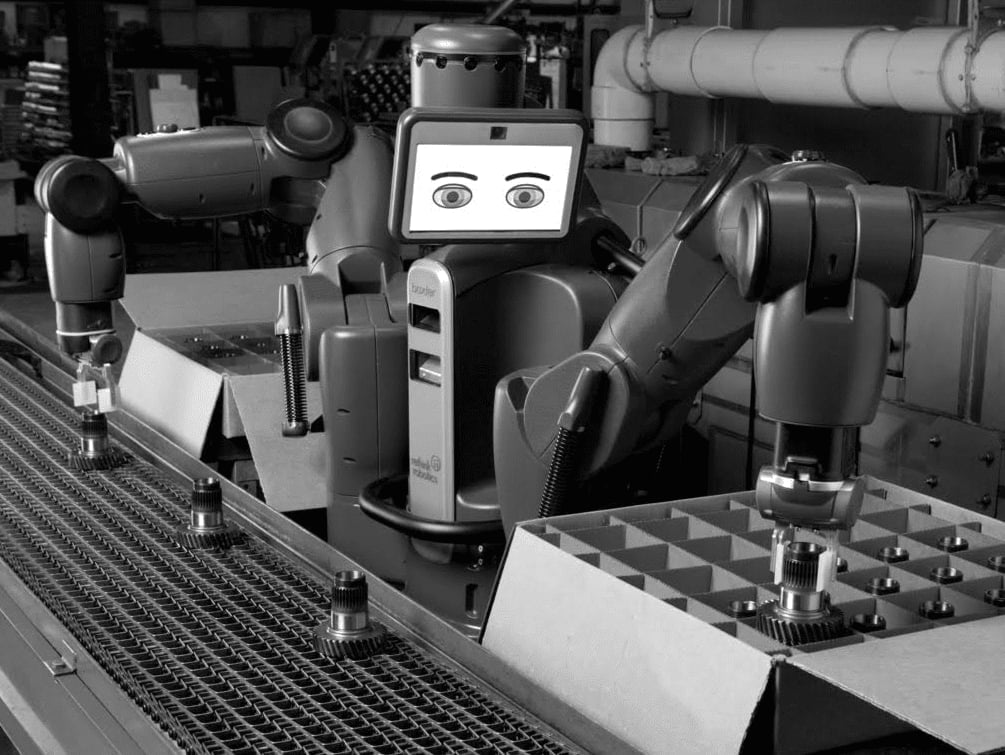
Curiously, Mori claims that the lack of anthropomorphic features in industrial robots precludes humans from feeling any affinity or familiarity with them, even though many have “arms.” What they lack, Mori emphasizes, is a “face.” He did not anticipate that today, even industrial robots are frequently provided with iPad “faces” and other anthropomorphic features, as illustrated by Rethink Robotic’s Baxter (Rethink Robotics 2014) (figure 2). Industrial robots can inflict serious injuries, and eye contact with a robot can help to keep workers safe while working near them.
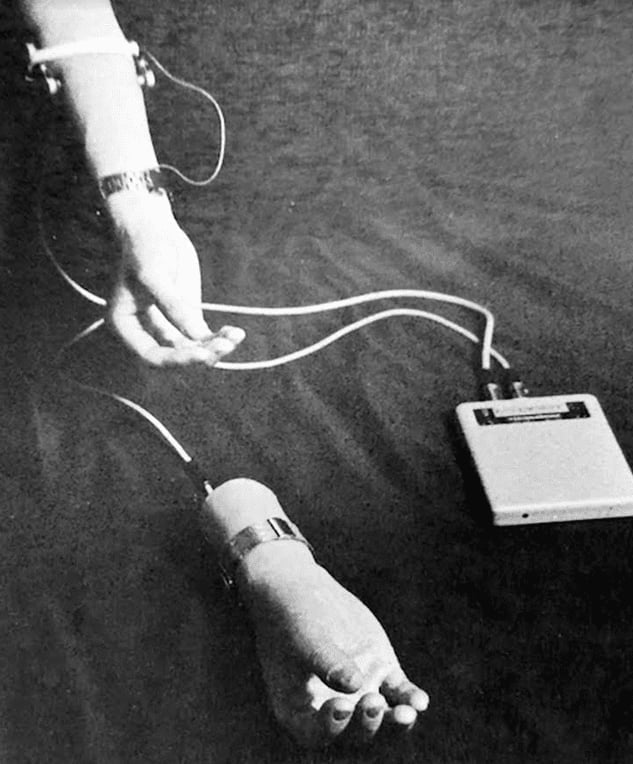
Since human-like androids would be developed in the 21st century, Mori, writing in 1970, referred to a prosthetics hand in developing his hypothesis that increasing the degree of humanlikeness in robots will boomerang. Instead of imparting a reassuring familiarity, Mori argues, such robots will appear creepy. This is especially the case when humanlike features are accompanied by humanlike movements. Mori illustrates this hypothetical point with the example of a realistic myoelectric prosthetic hand that makes the “average, healthy person” (ippan kenkōsha) feel ill at ease (figure 3). Moreover, he asserts, “if, under dimly lit conditions, someone wearing the hand shook a woman’s hand with it, she would likely shriek.” Not only does Mori resort to stereotypes about women as fearful and squeamish to make a point about creepiness, he also privileges “average, healthy persons” (Mori 1970 [2012a]: 4).
A prosthetic arm or leg that is too humanlike, Mori cautioned, will undermine an observer’s sense of reassuring familiarity. Contrary to Mori’s caution, most prosthetics artisans and manufacturers in Japan create lifelike artificial digits and limbs that enable disabled individuals to function “normally” in everyday life, almost as if they had no physical disability (Nakamura Brace Company 2016). According to Mori, concealing the artificialness of realistic-looking objects creates the conditions for the greatest jolt when what appears to be natural proves to be wholly unnatural. In prioritizing appearance over function, Mori implies that a disabled person wearing a realistic myoelectric prosthetic hand is responsible, and at fault, for disturbing the complacency of an “average, healthy person.” He thus recommends that a preferable alternative to the “pathetic” (itaitashii) myoelectric hand would be a cool, hip (kakkoi) prosthesis (Mori 1970 [2012a]: 7). This recommendation was then extended to suggest that robots should not appear overly humanlike. Despite his reference to prosthetics, Mori here reveals an almost callous indifference toward differently-abled persons.3
Translating bukimi no tani
Roboticist Karl MacDorman (Indiana University) was apparently the first to translate Mori’s essay on bukimi no tani into English in 2005 as a quick favor for a Japanese colleague. Describing that initial translation as “sloppy,” MacDorman published a corrected version in the June 2012 issue of IEEE’s Robotics and Automation. His was not the earliest use of the phrase, “uncanny valley,” however. Mori’s bukimi no tani was introduced in English as “uncanny valley” by the British art curator, critic, and editor Jasia Reichardt in her 1978 book, Robots: Fact, Fiction and Prediction (Reichardt 1978: 25-26). MacDorman (2006) refers to bukimi as “eerie” in his own articles, and admits that although misleading, he decided to retain the phrase “uncanny valley” in his 2012 translation because of its widespread use by that time (Hsu 2012).
Mori’s bukimi no tani hypothesis has informed the creation of computer-generated images as well as the principles of robot design; it is invoked as a theoretical premise in psychology, philosophy, and art and literary criticism. The number of articles on the uncanny valley has mushroomed to nearly 11,100 since 1970, 10,000 in the last decade alone.4 What I find uncanny about the uncanny valley hypothesis is how misappropriated it is despite being so widely accepted, cited, and applied. Many authors mistakenly link Mori’s hypothesis to the use of unheimlich (strangely familiar, uncanny) by Ernst Jentsch (1867-1919), a German psychiatrist, and Sigmund Freud (1856-1939), the Austrian neurologist and psychoanalyst. Freud (1919 [2003]: 5) quotes Jentsch’s 1906 essay, “On the Psychology of the Uncanny,” in describing the phenomenon of persons who doubt “whether an apparently animate being is really alive; or conversely, whether a lifeless object might not be in fact animate.” He notes that Jentsch is referring “in this connection to the impression made by wax-work figures, artificial dolls and automatons.”5 In his own essay, “The ‘Uncanny’,” Freud (1919 [2003]: 17) unpacks the etymology of unheimlich and diagnoses the experience of the uncanny as a manifestation of “repressed infantile complexes.” Exploring the ideas of Mori, Jentsch, and Freud together may be a productive exercise for some scholars, especially those in cultural studies and literary and art criticism (e.g., Ploeger 2014). It is important, however, to keep in mind that not once does Mori allude to psychology (shinrigaku) in his essay, much less cite Jentsch or Freud.
Of course, Japanese robot engineers were already familiar with the concept of bukimi no tani long before even Reichardt’s introduction eight years after Mori’s essay was published, but they do not seem to have paid much attention to it, at least in their publications, until the debut of Ishiguro Hiroshi’s androids—which he calls “geminoids” because they are doppelgängers, modeled after specific individuals, including himself (figure 1).

In contrast to the thousands of English-language publications on the uncanny valley, a Google Scholar advanced search in Japanese turned up four articles on bukimi no tani published between 1970 and 2000, two of which were Mori’s, and 246 articles that appeared between 2010 and 2020, 78 of them about Ishiguro’s geminoids, and many of the others essentially duplicates.6 In short, with the exception of Ishiguro-related material, the uncanny valley hypothesis is largely a preoccupation of Anglophone scholars representing a spectrum of disciplines.
Mapping Bukimi no Tani
Mori has claimed that he did not intend his hypothesis to be construed as a scientific statement. This point has been overlooked—or ignored—by scholars and robot designers who, in developing their arguments and prototypes, have invoked the “uncanny valley” as a real phenomenon. Even a cursory glance at Mori’s graphs will show that his hypothesis is highly impressionistic and based on his speculations. Mori’s essay includes two graphs, a simple one and a more complex, or double, one (figure 5). The former plots two specific objects and the latter, a variety of nonmoving and moving objects. In both, the vertical axis is labeled “familiar feeling” (shinwakan) and stretches from plus (+) to minus (–), while the horizontal axis is labeled “degree of similarity [to a human]” (ruijido) and given a value from 0 percent to 100 percent. All of the axes are rendered as sliding scales without fixed intervals (Mori 1970 [2012a]: 2, 5). Curiously, MacDorman’s English translation does not include Mori’s original graphs; instead he has inserted two graphs of his own design (Mori 1970 [2012b]: 1, 2).
Mori’s simple graph is an undulating line that plots only a toy robot (omocha robotto) and a puppet theatre (bunraku) marionette on either side of the bukimi no tani indicated by a sharp dip below the horizontal axis. The position of the toy robot indicates Mori’s belief that it imparts a slightly less “familiar feeling” than a bunraku doll. In his translation, MacDorman adds additional objects to this simple graph: the industrial robot, positioned before the humanoid robot, and the healthy person positioned above the bunraku puppet. He also places the prosthetic hand in the bukimi no tani, although Mori left that space empty, even though his hypothesis was based on the myoelectric prosthetic hand. (Mori adds the hand to his complex graph.)
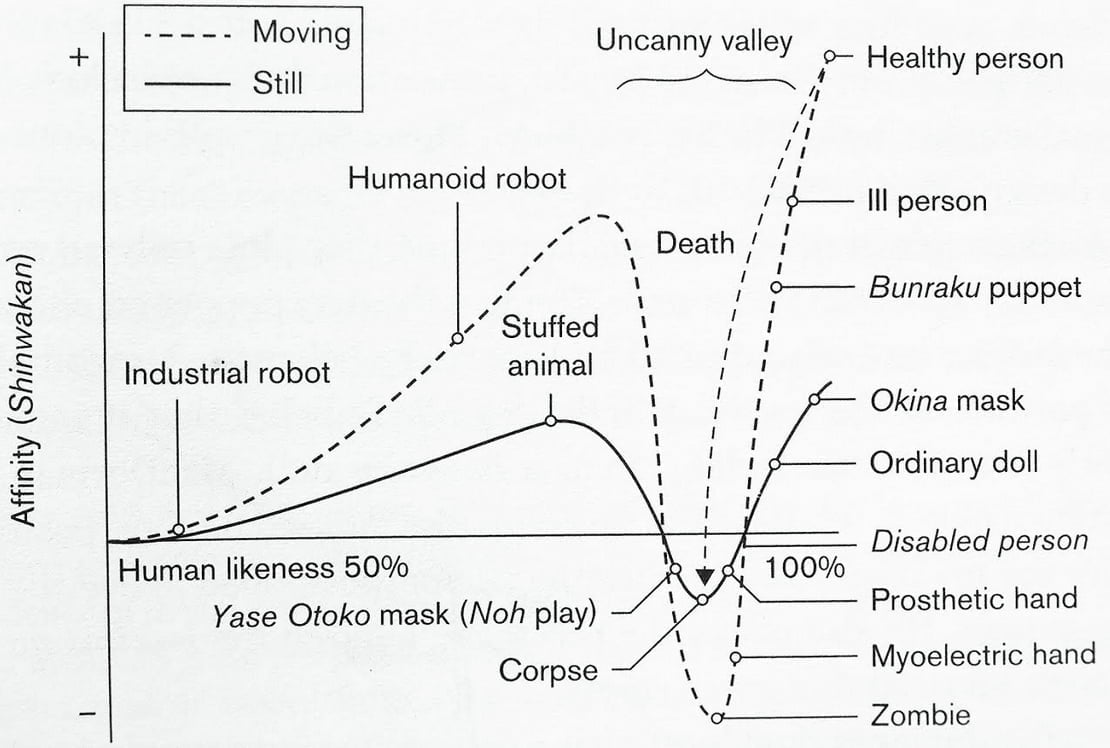
Mori’s complex graph (figure 5) amounts to a composite of two graphs: one plots nonmoving objects and the other plots moving objects. They are shown combined in Figure 6, my adaptation of MacDorman’s graph which renders Mori’s double graph as a single image—the nonmoving objects are indicated by a line and the moving objects tracked with a dotted line. Mori himself simply draws two different undulating lines on each graph that have topographical allusions: the one representing nonmoving forms resembles a hillock, and the one representing moving objects a steep mountain (figure 6).
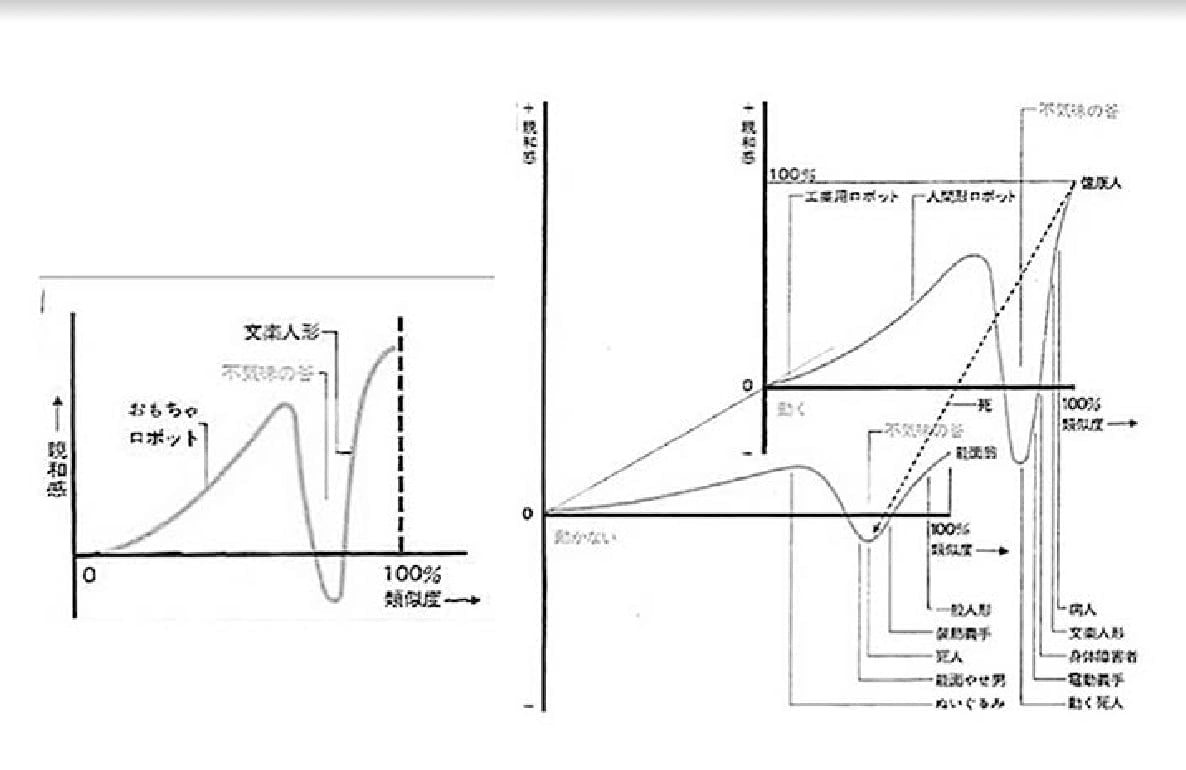
As shown in Figure 6, on the apex of the slowing rising line plotting nonmoving objects, Mori places stuffed animals (nuigurumi), and, in the “valley of eerie feeling” he plots the emaciated man (yaseotoko) noh mask, a corpse (shibito), and the realistic prosthetic hand (sōshoku gishu), in that order, with the corpse at the bottom of the valley. The line then rises above the horizontal; at a point a little below thatw where the stuffed toys are plotted, Mori positions ordinary dolls (ippan ningyō), and at a point a little higher, the wise old bearded man (okina) noh mask.
On the steeper upward slope of the moving line, Mori plots first the industrial robot followed by the humanoid robot. The line continues upward and then suddenly plunges into the “valley of eerie feeling,” at the bottom of which is the zombie (ugoku shibito), followed by (on an upward trajectory) the myoelectric hand (dendōgishu), and the physically disabled person (shintai shōgaisha). MacDorman omits this last “category” from his version, perhaps out of respect, inadvertently highlighting Mori’s disturbing lack of sensitivity to differently abled humans, as I noted earlier.7 Above the horizontal axis, the moving line continues with the bunraku puppet and the ill person (byōnin) until it reaches the healthy person (kenkōjin) who represents 100 percent affinity.
What has Mori himself said, in hindsight, about the widespread impact in diverse disciplines, and especially robotics, of his 1970 essay on bukimi no tani? Questioned about his reflections forty-two years later, he told Silicon Valley-based writer, Norri Kageki (2012):
I have read that there is scientific evidence that the uncanny valley does indeed exist; for example, by measuring brain waves scientists have found evidence of that. I do appreciate the fact that research is being conducted in this area, but from my point of view, I think that the brain waves act that way because we feel eerie. It still doesn’t explain why we feel eerie to begin with. The uncanny valley [bukimi no tani] relates to various disciplines, including philosophy, psychology, and design, and that is why I think it has generated so much interest. However, I never imagined that it would gain such a magnitude of interest when I first wrote about it. Pointing out the existence of the uncanny valley was more of a piece of advice from me to people who design robots rather than a scientific statement.
The Missing Dimension of Time
Whether as advice or in the guise of a scientific statement, both the widespread application of the “uncanny valley” concept and its critiques have resulted from the mistranslation of bukimi no tani as I noted earlier. Indeed, I realized while reading Mori’s 1970 essay that the valley per se is not the subject of the eerie; rather, it is the person who suddenly perceives something as disconcerting who creates the valley in the first place. Clearly, the valley (of eeriness) is not a fixed geological feature, metaphorically speaking, for someone to fall into. It is reasonable to posit that not everyone reacts to a given thing or stimulus in the same way—some may fall into a valley of eeriness of their own creation, others may not conjure such a valley at all. Mori treats the bukimi no tani response as a human universal, as if all humans were hard-wired the same way. It is more likely that other factors—such as physical and cognitive abilities, age, sex, gender, sexuality, ethnicity, education, religion, and cultural background—influence the way in which people respond to an unfamiliar sight or an extraordinary and shocking impression.8
I also realized that Mori neglected the dimension of time. He plots the experience of either affinity or repulsion according to appearance and/or movement, noting the dominance of the latter. Even though alluded to by movement, the temporal dimension remains inert. In positing the crucial importance of the dimension of time, I argue the inverse of what Ishiguro Hiroshi and his co-authors realized. They demonstrated that it took a human observer just two seconds to realize that a body making slight postural adjustments was not that of a human but an android (geminoid) and concluded that the “uncanny valley” effect could be easily avoided for very brief encounters (Ishiguro 2007: 112; Pollick 2010: 72). Ironically, I argue that the same finding can be used to make the opposite claim: namely, that the eerie or creepy feeling of realizing that one is in the presence of a subtly moving android (and not a flesh-and-blood human) lasts only for a second or two in duration. In other words, even if there is such a thing as the uncanny valley, or more precisely, the “valley of eerie feeling,” it is likely to last but a moment.9 There may be lots of reasons for not making androids, or realistically humanlike robots, but the avoidance of the so-called uncanny valley is not, need not, be one of them.
Concluding Remarks
To a large extent in the field of robotics, the concept of bukimi no tani is irrelevant in the sense that androids—robots that can pass as humans (for two seconds)—do not exist outside of science fiction films and at temporary installations at science museums and department stores. The geminoids made by Ishiguro Hiroshi are essentially telepresencing devices. Unlike mobile humanoid robots, androids are seated and are only capable of facial expressions—the eyebrows and mouth move in sync with those of a backstage operator fitted with sensors, somewhat like a ventriloquist speaking through an electronically activated mannequin. Humanoid robots, and androids, are very complex and very expensive devices that are also fragile and prone to hardware and software glitches. Apart from small humanoid robot toys and animaloids marketed as companion-bots and entertainment-bots, the vast majority of robots of all shapes and sizes are specialized for specific tasks, such as welding and vacuuming. Humanoid robots serve as platforms for spinoff industries, from mobility devices to components for drones and other robotic weapons systems. The latter—weaponized robotics—is a growth industry in Japan that is not given the media coverage it warrants (Kabata 2018; Onozuka 2016; Pfanner 2014). Finally, it is also the case that people today of all stripes across many cultural areas are much more comfortable coexisting and bonding with AI and robotic devices, such as Alexa or Siri and Roomba (Huang, Picart, Gillan 2020). When he developed his bukimi no tani hypothesis, Mori Masahiro did not anticipate the blurring of human-animal-technology boundaries, or marriages between humans and holograms of virtual idols, like Hatsune Miku (Arif 2018). The technological artifacts that Mori perceived as bukimi no longer provoke an unsettling eeriness; rather, as Anna Wiener (2020) testifies in her memoir, Uncanny Valley, the pervasive misogyny and sexism of Big Tech culture itself constitutes a gigantic bukimi no tani that should alarm and freak out all Technosapiens.
References
Arif, Shabana (2018, 12 November). Japanese Man Spends over £13k on Wedding to Marry Virtual Idol Hatsune Miku. VG 24/7. Accessed November 2020.
Bukimi (1978). Kōjien. Tokyo: Iwanami Shoten.
Burleigh, T.J., Schoenherr, J. R., Lacroix, G. L. (2013). Does the Uncanny Valley Exist? An Empirical Test of the Relationship between Eeriness and the Human Likeness of Digitally Created Faces. Computers in Human Behavior 29:759–771.
De Oliveira Barata, Sophie (2015). What Inspires Me. altlimpro. Accessed July 2016.
Expo-70 Fujipan Pavillion Robots (2011, 16 December). Cybernetic Zoo. Accessed July 2016.
Freud, Sigmund (1919 [2003]). Das Unheimliche (The “Uncanny”). Trans. Alix Strachey London: Penguin Books.
Gee, F.C., Will Niel Browne and Kazuhiko Kawamura (2005). Uncanny Valley Revisited. 2005 IEEE International Workshop on Robots and Human Interactive Communication. 151–157. ccessed July 2016.
Hsu, Jeremy (2012, 12 June). Robotics’ Uncanny Valley Gets New Translation. Livescience. Accessed July 2016.
Cobots Guide. Rethink Robotics. Accessed December 2020
Huang, Lixiao, Jose Picart and Douglas Gillan (2020, 3 August). Toward a Generalized Model of Human Emotiona Attachment. Theoretical Issues in Ergonomics Science. Published online. Pp. 1-22.
Ishiguro, Hiroshi (2007). Scientific Issues Concerning Androids. The International Journal of Robotics Research 26: 105–117.
Jentsch, Ernst (1906). Zur Psychologie des Umheimlichen (On the Psychology of the Uncanny). Psychiatrisch-Neurologische Wochenschrift (Psychiatric-Neurological Weekly) 22: 195–198; 23: . 203–210.
Kabata, Hisatoshi (2018). Jinkō chinō no gunji ōyō: sekai no genjō to Nihon no sentaku (Military Application of Artificial Intelligence: International Situation and Possible Choices by Japanese Academic Researchers [sic]. Kagaku Gijutsu Shakairon Kenkyū 16: 31-42.
Kageki, Norri (2012, 8 February). An Uncanny Mind: Masahiro Mori on the Uncanny Valley and Beyond. June 12. . Accessed July 2016.
MacDorman, Karl F. (2006). Subjective Ratings of Robot Video Clips for Human Likeness, Familiarity, and Eeriness: An Exploration of the Uncanny Valley. Accessed July 2016.
Mori, Masahiro (1970 [2012a]). Bukimi no Tani (The Valley of Eeriness). Enajii (Energy) 7(4): 33–35.
Mori Masahiro (1970 [2012b]). The Uncanny Valley: The Original Essay by Masahiro Mori. Trans. Karl F. MacDorman and Norri Kageki. IEEE Spectrum. June 12.
Nakamura Brace Co. (2016). Accessed July 2016.
Onozuka Tomoji (2016). Sensō to heiwa to keizai: 2015nen no “Nihon” o kangaeru (War, Peace and Economy: A Reflection on “Japan” in 2015). Kokusai buki iten (Global Arms Transfer [sic]) 1: 15–40.
Otake, Tomoko (2012, 12 August). Professor aspires toward the perfect prosthetic design. Japan Times. Accessed July 2016.
Pfanner, Eric (2014). Japan Inc. Now Exporting Weapons. Wall Street Journal. July 20. Accessed July 2016.
Ploeger, Daniël (2014). Eerie Prostheses and Kinky Strap-Ons: Mori’s Uncanny Valley and Ableist Ideology. BST 13. Accessed July 2016.
Pollick, Frank E. (2010). In Search of the Uncanny Valley. In Petros Daras and Oscar Mayora Ibarra, eds., Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering. 69–78. Series vol. 40. Berlin and Heidelberg: Springer-Verlag.
Reichardt, Jessica (1978). Robots: Fact, Fiction + Prediction. London: Thames and Hudson.
Rethink Robotics (2016). Accessed July 2016.
Robertson, Jennifer (2010). Gendering Humanoid Robots: Robo-Sexism in Japan. Body and Society 16 (2): 1–36.
Robertson, Jennifer (2018). Robo Sapiens Japanicus: Robots, Gender, Family, and the Japanese Nation. Berkeley: University of California Press.
Shunji Yamanaka—Prosthetic (2016). Design Inspiration.Net. Accessed November 2020.
Wang, Brian (2012, 18 September). Rethink robotics reveals its revolutionary Baxter Manufacturing Robot. Next Big Future. Accessed July 2016.
Wiener, Anna (2020). Uncanny Valley: A Memoir. New York: MCD (Farrar, Straus and Giroux.)
Yoo, Doo-Sung (2013). Organ-Machine Hybrid: Experiments in Combinations of Animal Organs with Electronic Devices and Robotics for New Artistic Applications. Journal of the New Media Caucus 9. Accessed July 2016.
Leave a Reply
You must be logged in to post a comment.